基本姿勢
基本姿勢
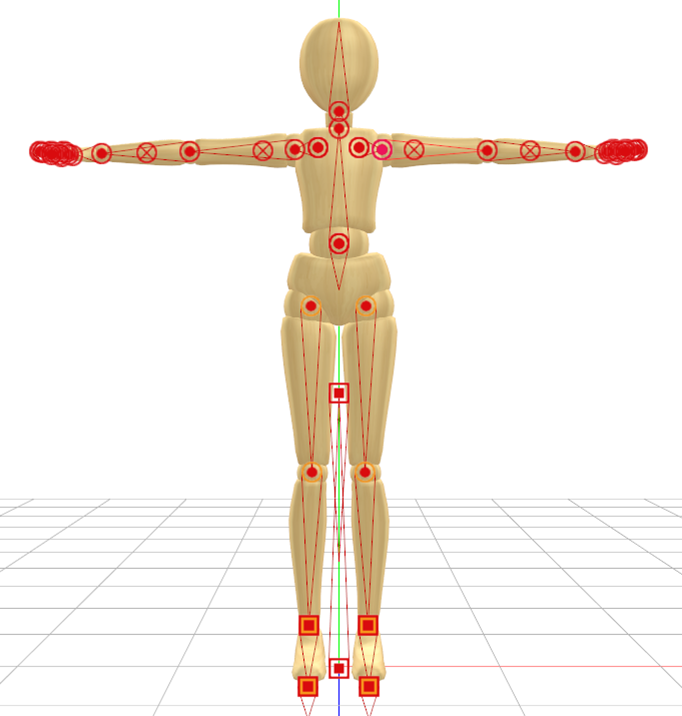
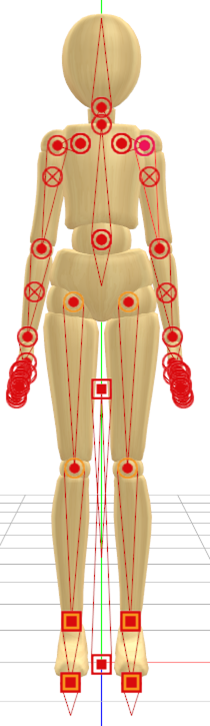
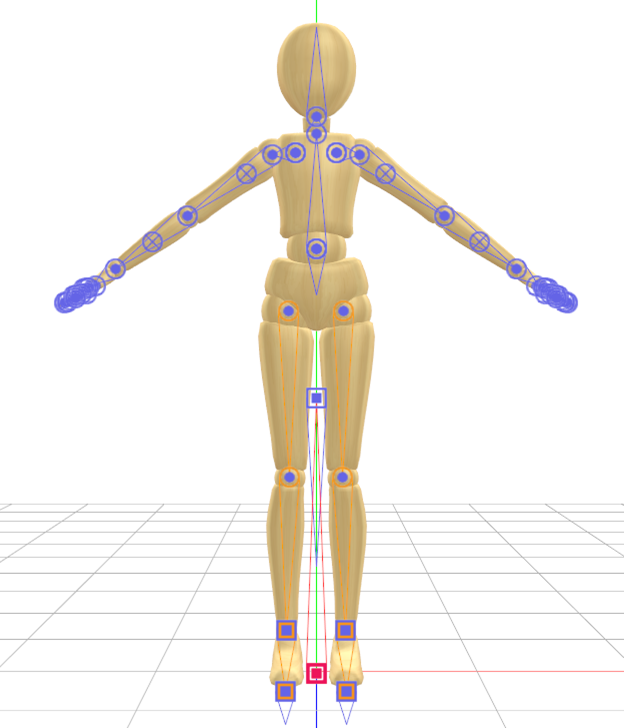
共通で扱う内部データは、下記を基本姿勢とする。
- T字ポーズ
- 腕
- 手は地面に水平に伸ばす
- 手のひらは下向き
- 肘が曲がる部分は後ろ(背中側)
- 足は肩幅に開く
- 腰
- 背筋を伸ばす
- 腰はそらさない
- 足
- 膝を伸ばす
- 足首は踵を上げない
- 足の裏は地面につける
- 重心は踵から指先にかけて均等にかかる
- 足の指は前に向ける
- 足は肩幅まで開く
- 腕
腕の座標は両肩の中心を原点とし、中心からの角度で表す。
自作ロボットの基本姿勢は、T字ポーズの差分を筐体固有補正として保持し、もっとも楽な姿勢を基本姿勢とする。
上記のことを踏まえて、筐体の姿勢は下記のように表す。
筐体の姿勢=基本姿勢+筐体固有補正データ+キャリブレーションデータ
基本姿勢
ポーズ
人型ロボットの基本姿勢を定義する場合は、下記の三つのポーズが考えられる。
| T字ポーズ | A字ポーズ | 気を付けポーズ |
|---|---|---|
|
|
|
|
T字ポーズなど3DCGなどのモデリングソフトウェアでの基本ポーズは、 人間と特異なポーズのため人間がもっとも楽なポーズを基準にすべきという意見もある。
ただし、以下の理由から、T字ポーズを基本姿勢とする。
- 筐体の問題で、手を真下に下した状態が取れないロボットがいる。
- 人体として「お腹の中の赤ちゃん」と同様の丸まった姿勢が一番楽な姿勢という意見があるが、それを基本姿勢にしてよいものか?
内部データとしてT字ポーズを基本姿勢としてるが、 各ロボットの基本姿勢は、T字ポーズの差分をキャリブレーションデータとして保持し、もっとも楽な姿勢を基本姿勢とする。
座標
手足などの座標は、両肩の中心を原点とし、中心からの角度で表す。
理由は関節の角度,稼働範囲比率,SI単位系(mmなど)で表すと、 拍手などの体の中心で手を合わせるモーションなどの流用が出来ず、個々の筐体の固有データになるため。
